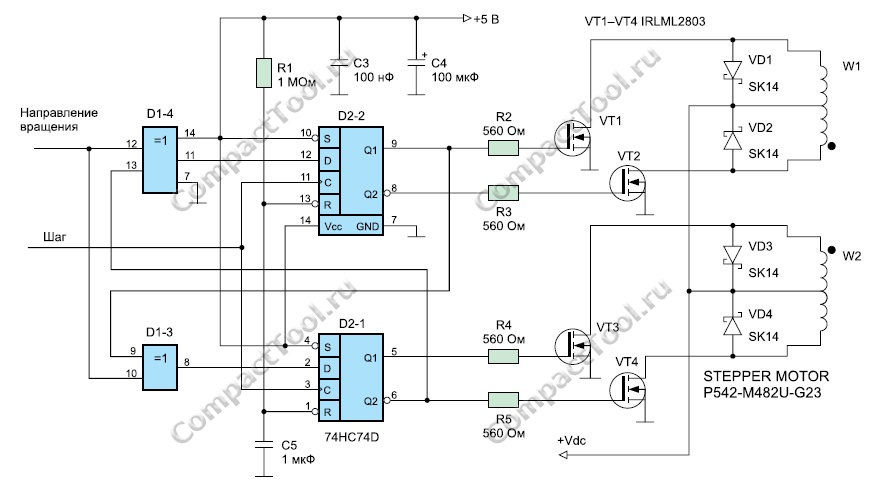
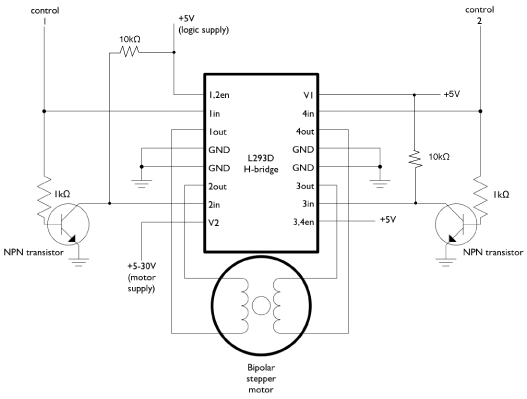
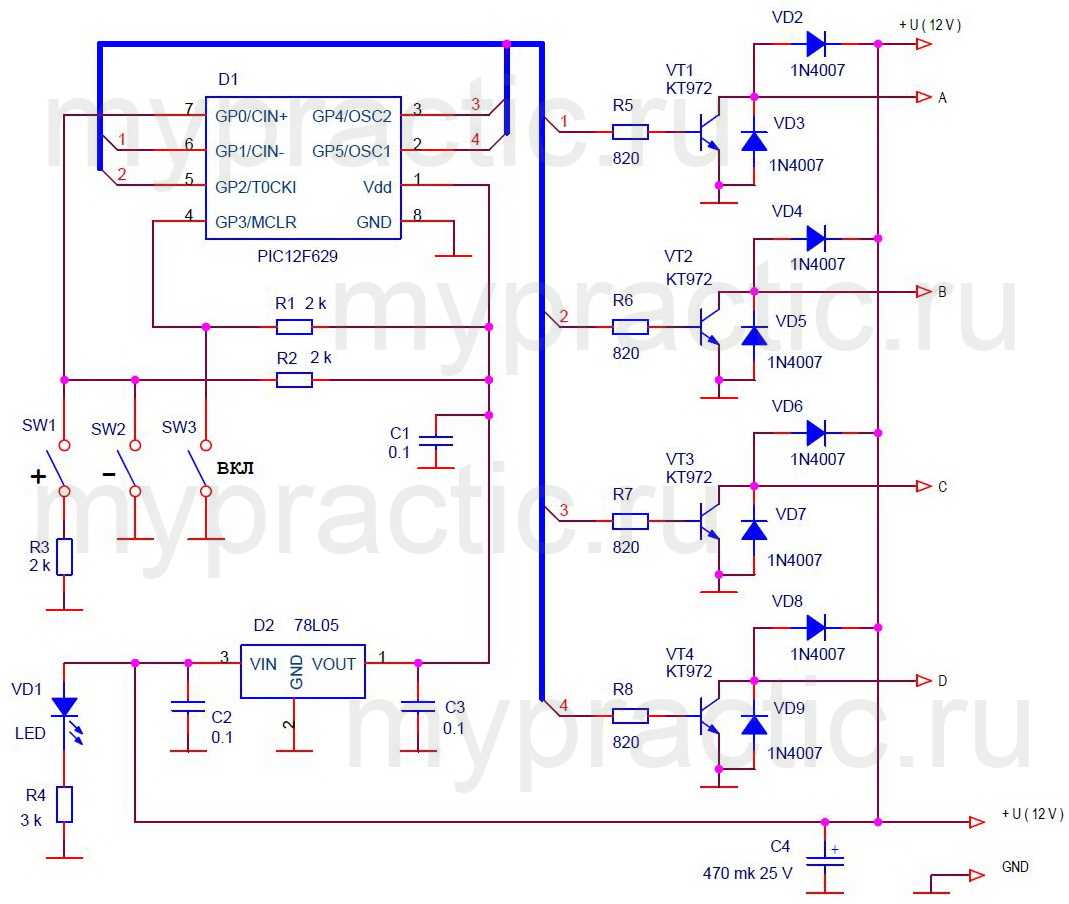
Схема драйвера биполярного шагового двигателя

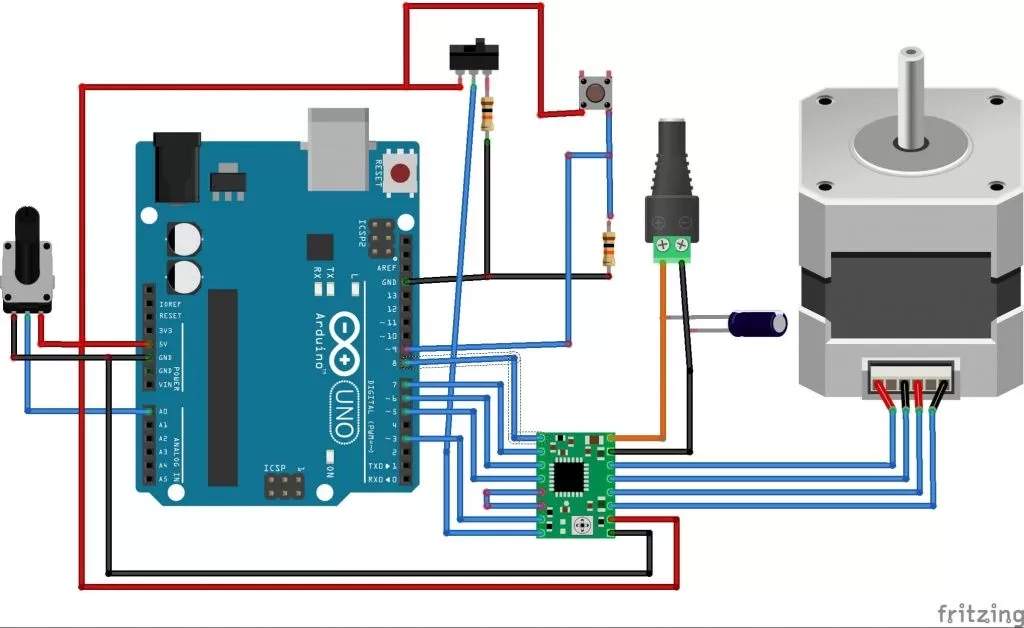
Драйвер шагового мотора Pololu на DRV8834 2,5-10,8В 1,5А (контакты не впаяны)
OpenRobo Самодельные роботы. Рекламодатели: Шаговые и моментные двигатели купить шаговый двигатель. Драйвер шагового двигателя своими руками Содержание этой части обучения.







")
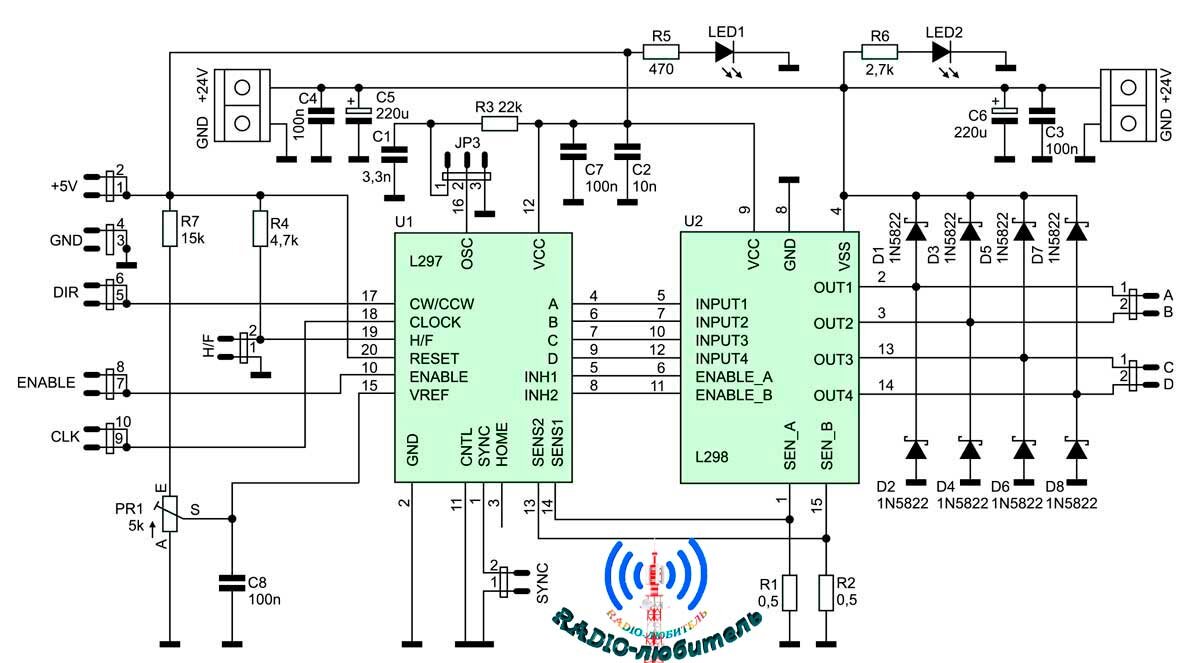
Поскольку драйвера для шаговиков LD более популярны у радиолюбителей, чем LB, и их гораздо легче достать, то, по просьбам форумчан, я решил написать продолжение статьи про управление биполярными шаговыми двигателями и рассмотреть схему с драйвером LD. Про то, как подключать обмотки и в каком порядке на них подавать сигналы, я писать не буду, это было подробно рассмотрено в первой части статьи , вместо этого давайте рассмотрим, чем, с точки зрения управления, драйвер LD отличается от рассмотренного нами ранее драйвера LB и как нужно переделать схему и программу управления, чтобы получить точно такое же устройство, только на драйвере LD. Итак, в чём же отличия? Во-первых, — в обозначениях. Во-вторых, — в количестве управляющих сигналов.







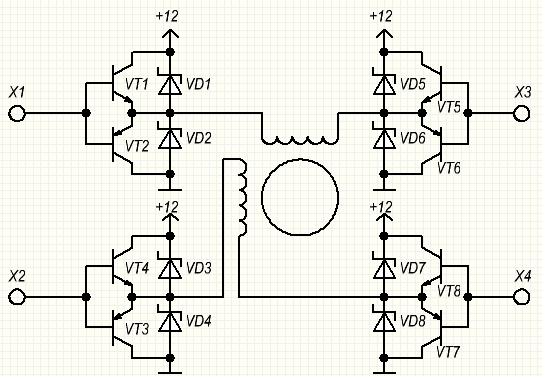
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC , заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения. Шаговые двигатели не имеют коммутаторов и щеток.